LiDAR (Light Detection and Ranging) atau cahaya pendeteksi dan jangkauan, adalah metode penginderaan jauh yang populer digunakan untuk mengukur jarak yang tepat dari suatu objek di permukaan bumi. Meskipun pertama kali digunakan pada 1960-an ketika pemindai laser dipasang ke pesawat terbang, LiDAR tidak mendapatkan popularitas yang layak sampai dua puluh tahun kemudian. Baru pada tahun 1980-an setelah pengenalan GPS, GPS menjadi metode yang populer untuk menghitung pengukuran geospasial yang akurat. Sekarang cakupannya telah menyebar ke berbagai bidang.
Teknologi LiDAR
Menurut American Geoscience Institute, LiDAR menggunakan laser berdenyut untuk menghitung jarak variabel suatu objek dari permukaan bumi. Pulsa cahaya ini digabungkan dengan informasi yang dikumpulkan oleh sistem udara sehingga menghasilkan informasi 3D yang akurat tentang permukaan bumi dan objek target.
Ada lima komponen utama instrumen LiDAR yaitu sensor LiDAR, Global Positioning System (GPS), Inertial Measuring Unit (IMU), dan kamera digital. Elemen lain yang memainkan peran penting dalam pengumpulan dan analisis data adalah fotodetektor dan optik. Sebagian besar organisasi pemerintah dan swasta menggunakan helikopter, drone, dan pesawat terbang untuk memperoleh data LiDAR.
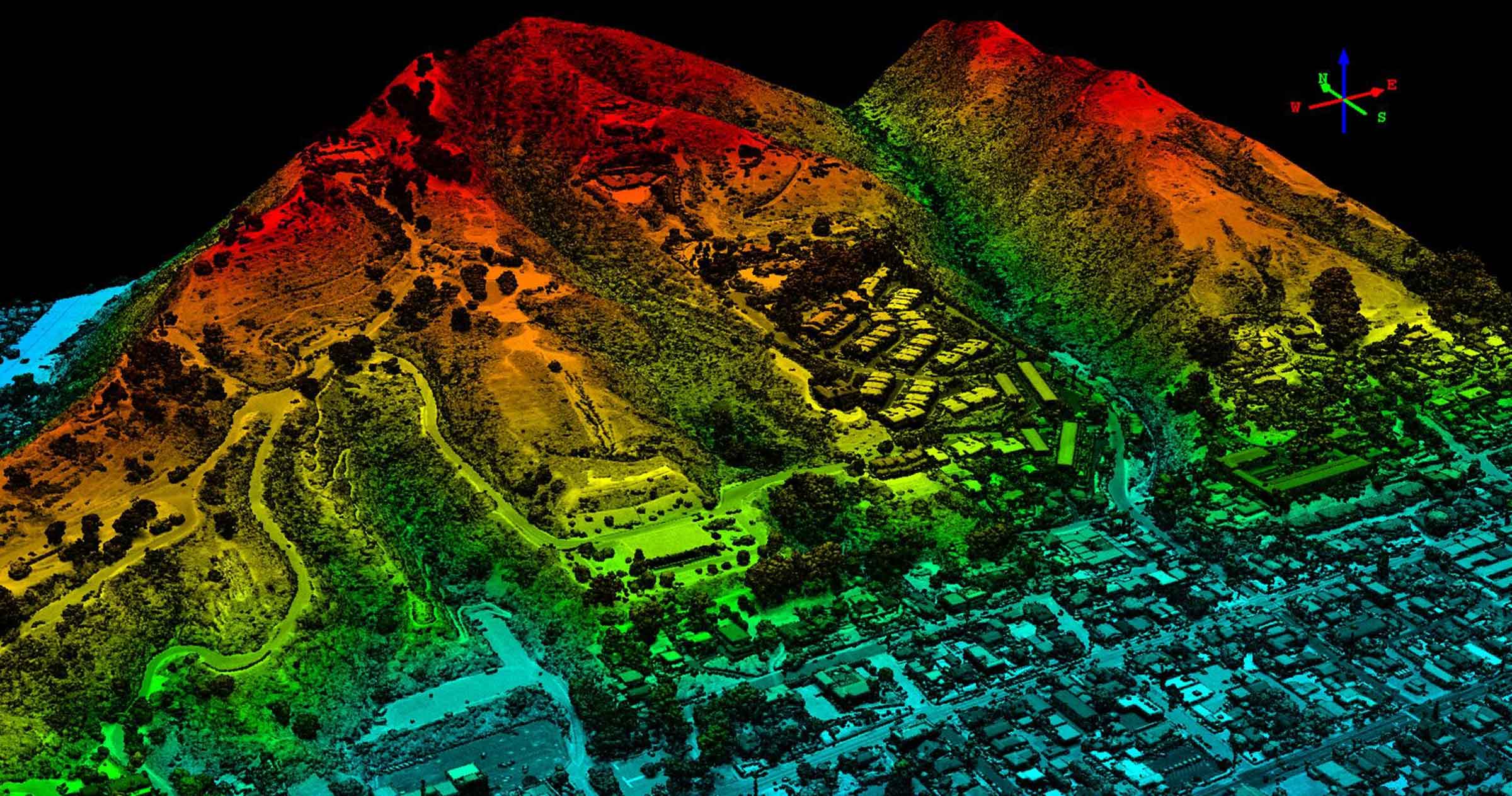
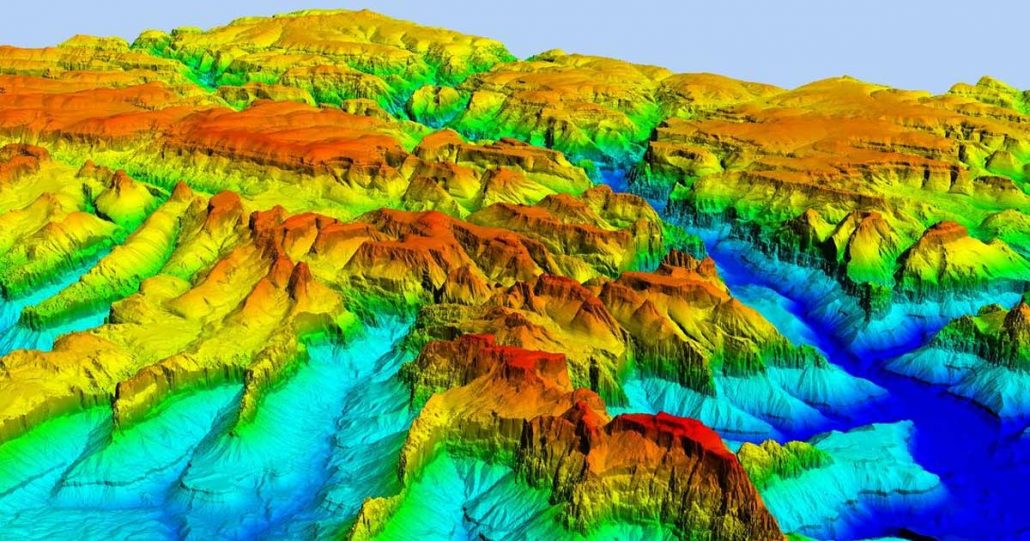
LiDAR dapat dengan cepat mengukur permukaan bumi dengan laju pengambilan sampel data lebih besar dari 150 kilohertz (150.000 pulsa per detik). LiDAR menghasilkan produk berupa kumpulan titik awan (points cloud) yang tergeoreferensi, sehingga menghasilkan representasi tiga dimensi (3D) dari permukaan bumi dan objek-objek diatasnya. Sistem LiDAR pada umumnya banyak beroperasi dengan menggunakan gelombang near infrared (NIR). Namun beberapa sensor pun ada yang menggunakan spektrum gelombang hijau untuk menembus air dan mendeteksi keadaan di dasar air.
LiDAR dapat memperoleh data di bawah kanopi pohon. Hal ini lah yang menjadi keunggulan LiDAR dibandingkan dengan fotogrametri dan pemetaan menggunakan citra satelit. Meskipun tidak semua data di bawah kanopi pohon dapat diperoleh, tetapi data tersebut dapat dijadikan sampel titik permukaan tanah di daerah yang berpohon tersebut. Hal ini karena LiDAR menggunakan sinar laser, sehingga selama masih ada celah cahaya yang bisa menembus ke bawah kanopi pohon, maka data LiDAR dapat diperoleh.
Jenis Sistem LiDAR
Sistem LiDAR dibagi menjadi dua jenis berdasarkan fungsinya yaitu LiDAR Udara & LiDAR Terestrial.
a. LiDAR Lintas Udara / Airbone

LiDAR Airborne dipasang pada helikopter atau drone untuk mengumpulkan data. Segera setelah diaktifkan, LiDAR Airborne memancarkan cahaya ke permukaan tanah, yang kembali ke sensor segera setelah mengenai objek, memberikan pengukuran jarak yang tepat. LiDAR Airborne selanjutnya dibagi menjadi dua jenis yaitu LiDAR Topologi dan LiDAR Batimetrik.


LiDAR Topologi

LiDAR Batimetrik
b. LiDAR Terestrial

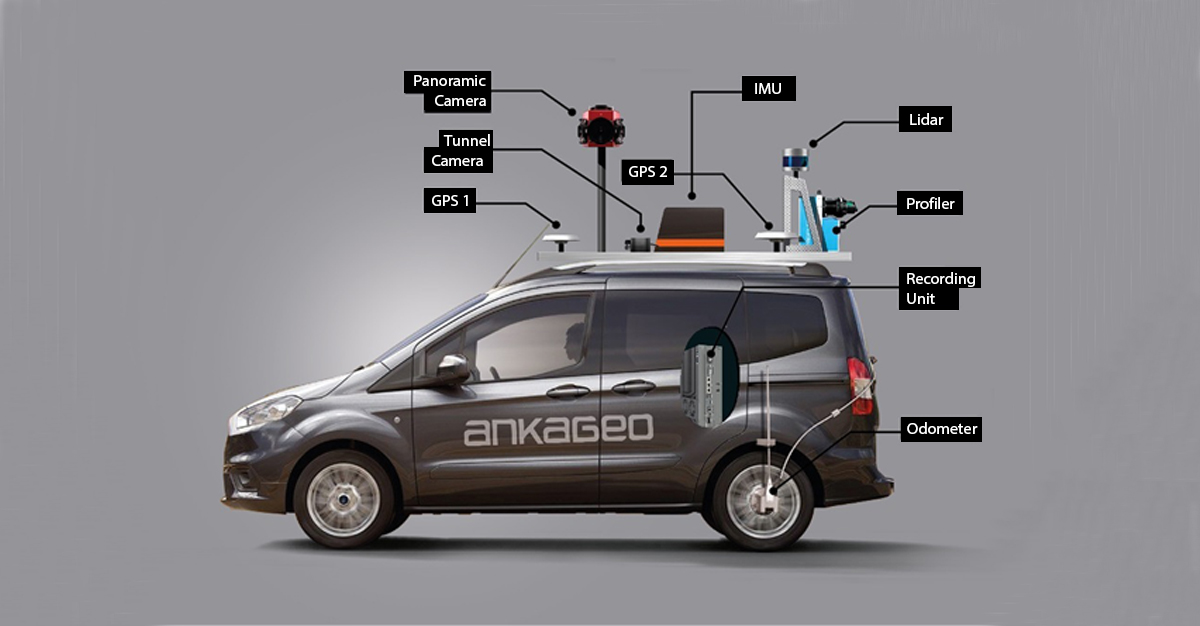
Tidak seperti Airborne, sistem LiDAR Terestrial dipasang pada kendaraan yang bergerak atau tripod di permukaan bumi untuk mengumpulkan titik data yang akurat. Ini cukup umum untuk mengamati jalan raya, menganalisis infrastruktur atau bahkan mengumpulkan point cloud dari dalam dan luar gedung. Sistem LiDAR Terestrial memiliki dua jenis LiDAR Mobile dan LiDAR Statis.

LiDAR Static
Komponen LiDAR
Sistem LiDAR terdiri dari empat komponen dasar, yaitu sensor LiDAR, Global Positioning System (GPS), Inertial Measuring Unit (IMU), dan kamera digital.
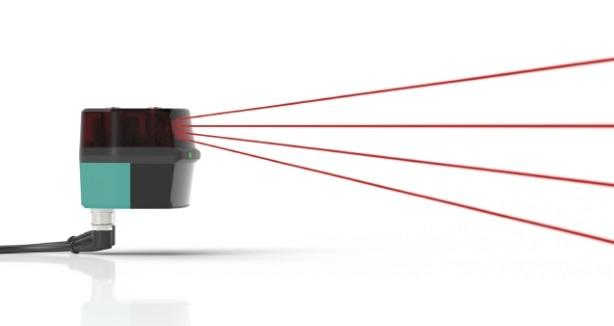
a. Sensor LiDAR
Sensor LiDAR berfungsi sebagai pemancar sinar laser ke objek dan merekam kembali setelah mengenai objek. Sensor laser memiliki beberapa karakteristik yang dapat dibedakan dari kekuatan sinar laser yang dipancarkan, cakupan dari pancaran sinar gelombang laser, dan jumlah sinar laser yang dihasilkan per detik.
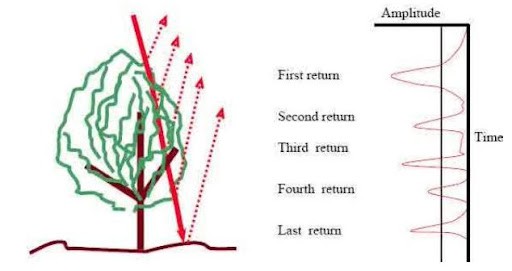
Salah satu karakteristik sensor laser LiDAR yang menjadi kelebihan LiDAR dibandingkan dengan yang lain adalah kemampuan gelombang tersebut untuk melakukan multiple return, yakni sensor LiDAR dapat merekam beberapa kali gelombang pantul dari objek yang ada dipermukaan bumi untuk setiap gelombang yang dipancarkan. Multiple return digunakan untuk menentukan bentuk dari objek atau vegetasi yang menutupi permukaan tanah. Gambar dibawah menunjukkan ilustrasi dari multiple return. Gelombang yang dipancarkan tidak hanya mengenai objek yang ada di atas permukaan tanah saja, tetapi juga mengenai permukaan tanah di bawah objek tersebut.
LiDAR Airbone

LiDAR Terestrial
Permukaan objek yang pertama kali memantulkan pulsa laser akan menjadi gelombang pantul pertama (first return). Gelombang ini yang umumnya digunakan untuk membuat Digital Surface Model (DSM). Objek yang kedua kalinya memantulkan pulsa tersebut akan menjadi second return dan seterusnya hingga gelombang pantulan terakhir.
b. Sistem Pemindai Optik
Ada beberapa jenis pemindai optik pada sistem LiDAR. Ini sangat menentukan kecepatan pencitraan gambar, mode pemindaian lidar ada beberapa jenis tergantung keperluan. Misalnya seperti dual axis scanner, polygonal mirrors, azimuth & elevation atau dual oscillating plane mirrors.
c. Global Positioning System (GPS)
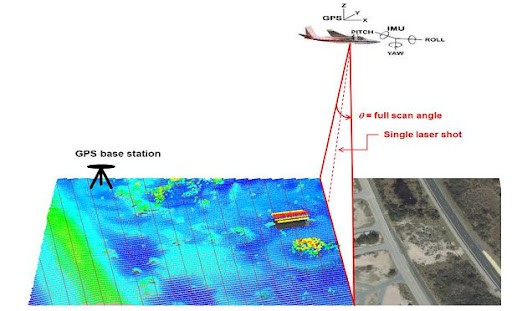
Metode penentuan posisi GPS yang digunakan dalam sistem LiDAR adalah diferensial kinematik. Posisi airbone selalu bergerak dan berubah-ubah dengan cepat ketika mengakuisisi data, maka dilakukan penentuan posisi GPS dengan metode kinematik untuk mendapatkan posisi dengan ketelitian yang tinggi. Pada gambar dibawah mengilustrasikan konfigurasi antara base station dan rover, sehingga menghasilkan koordinat titik yang disimpan sebagai point cloud.
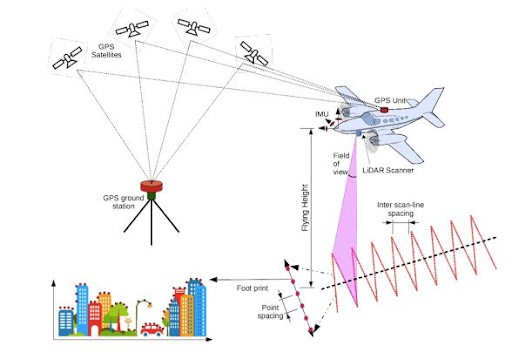

Metode diferensial kinematik memerlukan dua buah receiver GPS. Satu receiver diletakkan pada sebuah titik yang telah diketahui koordinatnya di permukaan tanah yang berfungsi sebagai base (stasiun referensi), sedangkan receiver yang lain diletakkan pada airbone sebagai roving receiver. Konfigurasi dari keduanya menghasilkan koreksi diferensial pada roving receiver, sehingga posisi laser pada airbone dapat diketahui secara real time dan akurat. Data GPS yang telah dihasilkan kemudian diolah secara post processing dan digabungkan dengan data Inertial Measuring Unit (IMU), sehingga diperoleh koordinat yang telah terdefinisi secara geografis
d. Inertial Measuring Unit (IMU)
GPS umumnya digunakan untuk menentukan informasi koordinat geografis sedangkan Inertial Measuring Unit (IMU adalah salah satu komponen dalam sistem LiDAR. IMU berfungsi sebagai instrumen yang mendeteksi pergeseran rotasi (orientasi) dari airbone terhadap sumbu-sumbu sistem terbang. Sistem tersebut dapat mengukur sudut perubahan berupa perilaku airbone (pitch, roll, dan yaw) terhadap sumbu-sumbu terbang. Kombinasi kedua data dari perangkat tersebut digunakan sebagai metode penerjemahan data sensor ke static points yang kemudian diolah lebih lanjut untuk aplikasi ke berbagai sistem.

Selain itu, IMU juga dapat mendeteksi perubahan percepatan pada wahana pesawat terbang. Gambar dibawah mengilutrasikan keadaan pitch, roll, dan yaw dari airbone.

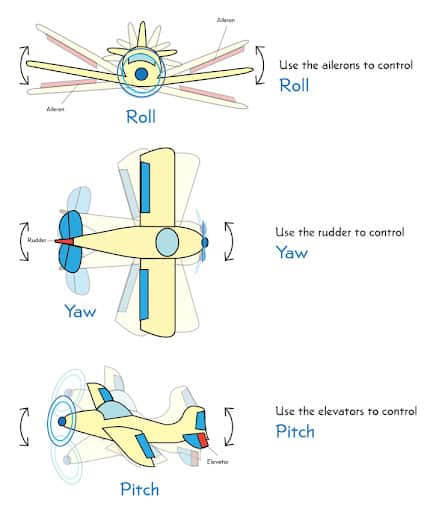
- Pitch: pergerakan rotasi sumbu y airbone terhadap sumbu y sistem terbang. Sumbu y airbone didefiniskan sebagai garis pada bidang horizontal yang tegak lurus sumbu x airbone. Sumbu y sistem referensi terbang didefinisikan sebagai garis yang tegak lurus dengan arah terbang horizontal wahana.
- Roll: adalah pergerakan rotasi sumbu x airbone terhadap sumbu x pada sistem referensi terbang. Sumbu x airbone didefinisikan sebagai garis lurus pada bidang horizontal yang melalui bagian depan (hidung) airbone hingga bagian belakang (ekor) airbone. Garis ini membagi dua badan pesawat sama besar. Sumbu x dari sistem referensi terbang didefinisikan sebagai garis yang berimpit dengan arah terbang horizontal wahana.
- Yaw: adalah sudut antara sumbu z airbone terhadap arah utara. Sumbu z airbone didefinisikan sebagai garis yang tegak lurus terhadap sumbu x dan y airbone.
IMU memantau pergerakan airbone sehingga dapat dilakukan koreksi untuk setiap posisi objek pada saat akuisisi data. Tanpa informasi dari IMU posisi footprint dari sinar laser yang dipancarkan tidak dapat diketahui secara pasti.
e. Kamera Receiver / Photo Detector
Kamera dalam sistem LiDAR berfungsi untuk menghasilkan foto dari area pengukuran LiDAR. Foto tersebut dapat ditumpang tindihkan (overlay) dengan data X, Y, Z hasil pengukuran LiDAR. Informasi ini digunakan ketika operator melakukan post processing data LiDAR.
f. Wahana LiDAR
Awalnya LiDAR dibawa oleh wahana pesawat udara atau disebut dengan Airborne LiDAR. Namun karena biaya sewa pesawat cukup mahal, maka dikembangkanlah wahana pesawat tanpa awak yang dapat membawa sensor LiDAR. Pesawat tanpa awak ini dikenal juga sebagai Unmanned Aerial Vehicle (UAV). Dimana wahana yang dimaksud dapat terbang sesuai dengan perencanaan terbang (autopilot) dan dapat melakukan pengambilan data LiDAR. UAV ini memungkinkan untuk melakukan pelacakan posisi dan orientasi dari sensor yang diimplementasikan dalam sistem lokal atau koordinat global.


Prinsip Kerja LiDAR
Pada dasarnya LiDAR bekerja dengan memancarkan gelombang melalui sensor laser yang dipantulkan kemudian diterima oleh scanner. Data yang dihasilkan akan diolah dan dipadukan dengan data lain yang diterima sensor pembantu seperti GPS, IMU, dan sebagainya.
Dari sana akan didapatkan perbedaan jarak, koordinat, orientasi, image / video dan data lain sesuai dengan sensor yang terdapat pada perangkat lidar. Setelah itu, data akan di proses dan dipadukan dengan data yang diterima oleh receiver (camera) dan ditampilkan pada layar LCD. Selain mendapatkan pencitraan 3D, kita juga akan mendapatkan hasil ukuran dalam bentuk data yang dapat diolah.
Pada saat sensor di pancarkan dan diterima oleh receiver maka akan ada konversi data, dimana

Output LiDAR
Data yang dihasilkan dari pengaplikasian LiDAR berupa data dalam bentuk point cloud. Point cloud merupakan kumpulan titik yang mewakili bentuk atau fitur tiga dimensi (3D). Setiap titik memiliki koordinat X, Y, dan Z. Ketika terdapat banyak kumpulan point cloud yang disatukan, maka point cloud tersebut akan membentuk suatu permukaan atau objek dalam bentuk 3D.

Point Cloud LiDAR
Kerapatan titik (point cloud) yang bisa dihasilkan oleh LiDAR yaitu 1- 300 titik/𝑚2, hal ini bergantung dari beberapa faktor, diantaranya adalah metode akuisi (tinggi terbang, jenis konfigurasi sensor, dan jenis permukaan), serta sudut pandang sensor ke permukaan bumi (field of view). Akurasi vertikal dari data LiDAR adalah kurang dari 20 cm dan untuk horizontalnya adalah 30-50 cm dalam range 15-24 cm dan horizontal 30-64 cm.
Data point cloud dapat digunakan untuk membuat model tiga dimensi permukaan bumi (3D), seperti digital elevation model (DEM), digital terrain model (DTM), digital surface model (DSM), dan normalized digital surface model (NDSM).
- Digital Elevation Model (DEM) merupakan penyajian persebaran titik diskrit yang merepresentasikan distribusi spatial elevation permukaan yang berubah-ubah dengan referensi datum tertentu. DEM menyajikan permukaan bumi tanpa menampilkan fitur vegetasi, bangunan, dan struktur buatan manusia yang lainnya.
- Digital Terrain Model (DTM) identik dengan DEM, bahkan disamakan posisinya. Ini berarti bahwa DTM hanyalah permukaan elevasi yang mewakili bumi kosong yang direferensikan ke datum vertikal. DTM biasanya dibuat melalui fotogrametri stereo. Titik-titik DTM secara terpisah secara teratur mengikuti bentuk permukaan bumi. Dari garis-garis ruang dan kontur yang teratur ini, dapat menginterpolasi DTM menjadi DEM. DTM merepresentasikan fitur medan yang lebih baik karena batas-batas 3D dan titik-titik massa 3D yang teratur secara spasial.
- Digital Surface Model (DSM) adalah model permukaan bumi yang meluputi fitur alami maupun buatan manusia, misalnya gedung, vegetasi, dan pepohonan. DSM juga merupakan model elevasi topografis permukaan bumi yang memberi batas acuan yang benar secara geometris. DSM menggambarkan puncak fitur yang terdapat di atas bare earth.
- Normalized Digital Surface Model (NDSM) adalah penyajian model elevasi objek pada permukaan datar. Model ini diperoleh dari perbedaan antara DSM dan DEM. NDSM dihitung dengan cara mengurangkan DSM dengan DEM. Penghitungan ini akan didapatkan tinggi objek yang ada di atas permukaan tanah.
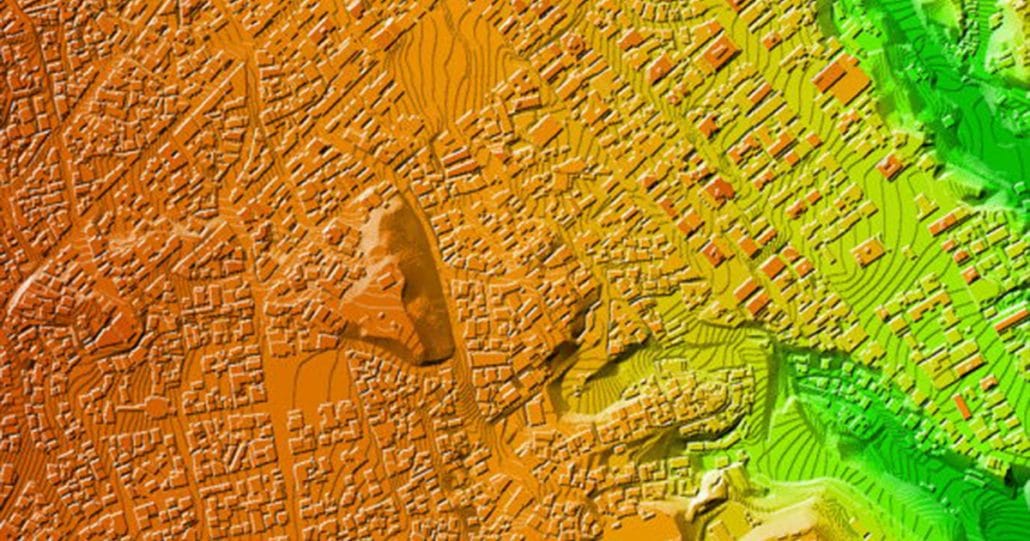
Digital Surface Model (DSM)
Digital Elevation Model (DEM)
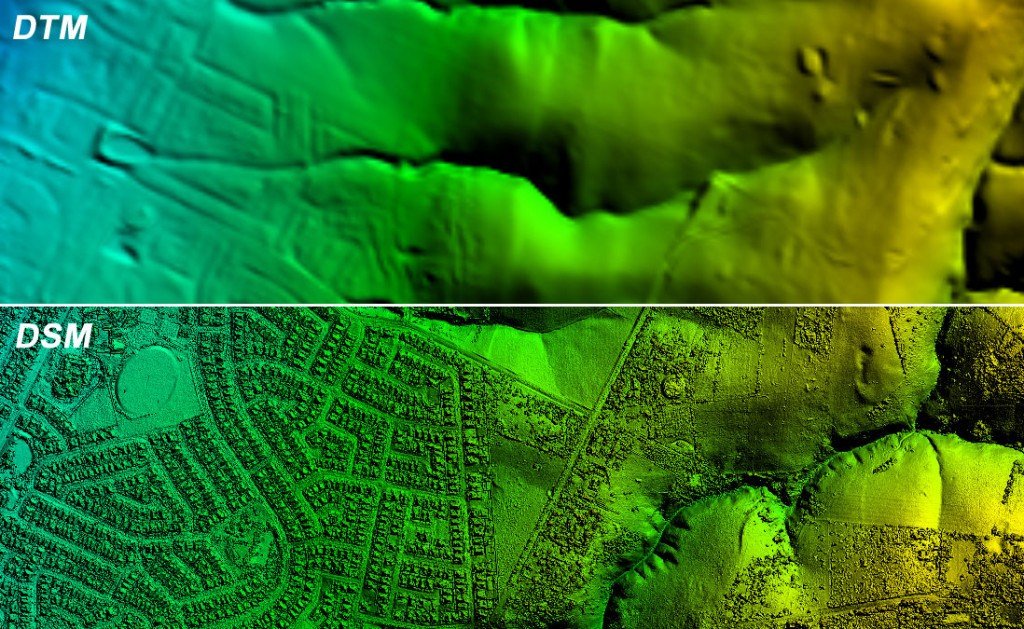
Perbandingan DTM/DEM dan DSM
Namun, sebelumnya point cloud harus diklasifikasikan menjadi ground point dan non-ground point terlebih dahulu. Ground point adalah point cloud yang membentuk permukaan bumi, tanpa objek-objek diatasnya seperti vegetasi, rumah, dll. Sedangkan non-ground point adalah point cloud yang membentuk objek-objek diatas permukaan bumi, seperti vegetasi, rumah, dll. Ground point ini akan digunakan untuk membuat DEM, sedangkan non-ground point akan digunakan untuk membentuk DSM dan NDSM. Selain itu, DEM yang dihasilkan pun dapat digunakan lagi untuk membuat garis kontur.

Garis kontur adalah garis khayal pada peta yang meghubungkan titik-titik dengan ketinggian yang sama. Garis kontur disajikan di atas peta untuk memperlihatkan naik turunnya keadaan permukaan tanah, juga untuk memberikan informasi slope (kemiringan tanah), irisan profil memanjam permukaan tanah terhadap jalur proyek, dan perhitungan galian serta timbunan (cut and fill) permukaan tanah.
Penggunaan LiDAR
LiDAR dapat digunakan untuk mencapai banyak tujuan pengembangan, beberapa di antaranya adalah:
Pemetaan Kawasan Hutan
Resolusi ultra-tinggi dan citra LiDAR yang presisi menangkap dan menyorot detail terkecil sekalipun. Untuk alasan ini, LiDAR semakin disukai oleh para ilmuwan dan ahli geologi. LiDAR dapat membantu melacak deforestasi dan pola pertanian lebih efisien daripada metode lainnya. Dan data yang diperoleh juga menunjukkan dengan tepat apa yang tidak teramati dalam estimasi sebelumnya, yang membuatnya semakin andal.
Oseanografi
Ketika pihak berwenang ingin mengetahui kedalaman permukaan laut yang tepat untuk menemukan objek apa pun jika terjadi kecelakaan laut atau untuk tujuan penelitian, mereka menggunakan teknologi LiDAR untuk menyelesaikan misi mereka. Selain mencari objek, LiDAR juga digunakan untuk menghitung fluoresensi fitoplankton dan biomassa di permukaan laut, yang sebenarnya sangat menantang.
Survey Model Elevasi atau Medan Digital
Ketinggian medan memainkan peran penting selama konstruksi jalan, bangunan besar dan jembatan. Teknologi LiDAR memiliki koordinat x, y, dan z, yang membuatnya sangat mudah untuk menghasilkan representasi ketinggian 3D untuk memastikan bahwa pihak terkait dapat menarik kesimpulan yang diperlukan dengan lebih mudah. Pada survei pertambangan LiDAR digunakan untuk memantau kemiringan lereng, menghitung volum stock pile, dan melakukan cut and fill.
Pertanian & Arkeologi
Aplikasi teknologi LiDAR di sektor pertanian mencakup analisis tingkat hasil, penelusuran tanaman, dan penyebaran benih. Selain itu juga digunakan untuk perencanaan, pemetaan di bawah kanopi hutan, dan lainnya.
Operasi Militer
LiDAR digunakan oleh geoscientist untuk menggali rahasia terkait geomorfologi, serta oleh militer untuk melakukan berbagai operasi keamanan di dekat perbatasan nasional. Mobil tempur, tank, kapal induk, kapal selam dan kendaraan militer lainya pada umumnya telah dilengkapi lidar untuk memetakan wilayah. Hal ini sangat berguna untuk mengetahui medan perang hingga jarak muruh.
Pemodelan Banjir
Dalam pemodelan banjir, LiDAR berperan dalam membentuk digital elevation model (DEM). DEM yang dihasilkan dari LiDAR memiliki kualitas data dan resolusi spasial yang lebih baik dibandingkan dengan citra satelit. DEM ini berfungsi untuk membentuk model geometri sungai yang akan digunakan pada tahapan simulasi banjir.
Pemantauan Tanah Longsor
Pada pemantauan tanah longsor, pengambilan data LiDAR dilakukan secara berkala dalam selang waktu tertentu. Pergerakan tanah dapat dipantau dari perubahan data yang didapatkan. Pemantauan tanah longsor menggunakan LiDAR akan menghasilkan model tiga dimensi dari lereng yang diamati.
Robot
Salah satu pemanfaatan LiDAR yang paling sering digunakan pada sebuah robot yaitu pada Robot antariksa tanpa awak. Robot ini biasanya digunakan untuk menganisa planet lain seperti mars atau satelit bulan.
Kendaraan Autonomous
Agar dapat berjalan sendiri, kendaraan kendaraan autonomous tentu menggunakan beberapa sensor. Salah satunya yaitu LiDAR. LiDAR dimanfaatkan untuk mengukur jarak sekitar, mengetahui objek di depan dan dibelakang serta memetakan area sekitar agar tidak terjadi benturan.
Penggunaan pada Smartphone dan Tablet
Pada smartphone dan tablet, LiDAR scanner dimanfaatkan untuk pengukuran ruangan atau objek yang dapat menghasilkan kedalaman sehingga dapat dengan mudah menerapkan Augmented Reality (AR) secara lebih nyata. Misalnya pada Apple Ipad Pro terbaru yang memudahkan para arsitek atau desainer interior untuk melalukan demo di depan client.
Comments
Post a Comment